
 wk
f396d21118
添加内容
wk
f396d21118
添加内容
|
1 年之前 | |
|---|---|---|
| .. | ||
| cmake | 1 年之前 | |
| demo | 1 年之前 | |
| doc | 1 年之前 | |
| src | 1 年之前 | |
| test | 1 年之前 | |
| tool | 1 年之前 | |
| win | 1 年之前 | |
| .clang-format | 1 年之前 | |
| .gitignore | 1 年之前 | |
| CHANGELOG.md | 1 年之前 | |
| CMakeLists.txt | 1 年之前 | |
| LICENSE | 1 年之前 | |
| README.md | 1 年之前 | |
| README_CN.md | 1 年之前 | |
README.md
rs_driver
1 Introduction
rs_driver is the driver kernel for the RoboSense LiDARs.
2 Supported LiDARs
- RS-LiDAR-16
- RS-LiDAR-32
- RS-Bpearl
- RS-Ruby
- RS-Ruby Lite
- RS-LiDAR-M1
- RS-Helios
3 Supported Platforms
rs_driver is compatible with the following platforms and compilers:
Ubuntu (16.04, 18.04)
- gcc (4.8+)
Windows
- MSVC ( tested with VC2017 and VC2019)
- Mingw-w64 (tested with x86_64-8.1.0-posix-seh-rt_v6-rev0 )
4 Dependency Libraries
rs_driver depends on the following third-party libraries. Please install them before compiling rs_driver.
- libpcap (optional, needed if parsing PCAP file)
- PCL (optional, needed if building the visualization tool)
- Eigen3 (optional, needed if use the internal transformation function)
5 Compilation and Installation
5.1 On Ubuntu
5.1.1 Dependency Libraries
sudo apt-get install libpcap-dev libpcl-dev libeigen3-dev
5.1.2 Compilation
cd rs_driver
mkdir build && cd build
cmake .. && make -j4
5.1.3 Installation
sudo make install
5.1.4 Use rs_driver as a third party library
In your CMakeLists.txt, find the rs_driver package and link to it .
find_package(rs_driver REQUIRED)
include_directories(${rs_driver_INCLUDE_DIRS})
target_link_libraries(your_project ${rs_driver_LIBRARIES})
5.1.5 Use rs_driver as a submodule
Add rs_driver into your project as a submodule.
In your CMakeLists.txt, find the rs_driver package and link to it .
add_subdirectory(${PROJECT_SOURCE_DIR}/rs_driver)
find_package(rs_driver REQUIRED)
include_directories(${rs_driver_INCLUDE_DIRS})
target_link_libraries(your_project ${rs_driver_LIBRARIES})
5.2 On Windows
5.2.1 Dependency Libraries
libpcap
Install libpcap runtime library.
Download libpcap's developer's pack to your favorite location, and add the path to WpdPack_4_1_2/WpdPack folder to the environment variable PATH .
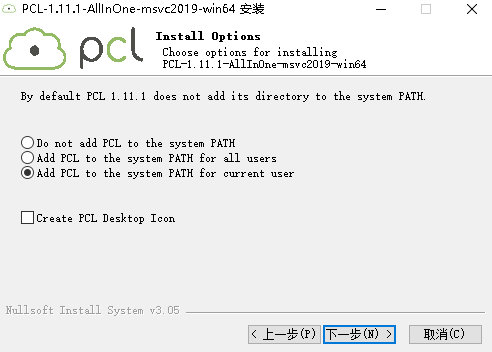
PCL
- MSVC
Please use the official installation package All-in-one installer.
Select the "Add PCL to the system PATH for xxx" option during the installation.
- Mingw-w64
Since there'are no installers for mingw-w64 compiler available, Please compile PCL out from source as instructed in this tutorial.
5.2.2 Installation
Installation is not supported on Windows.
6 Quick Start
rs_driver offers two demo programs in rs_driver/demo.
- demo_online.cpp
- demo_pcap.cpp
Please refer to them for usage of the rs_driver API.
demo_pcap is based on libpcap.
To build demo_online and demo_pcap, enable the option COMPILE_DEMOS when configure the project.
cmake -DCOMPILE_DEMOS=ON ..
For more info about how to decode an online Lidar, Please refer to Online connect LiDAR
For more info about how to decode a PCAP file, Please refer to Decode pcap bag
7 Visualization of Point Cloud
rs_driver offers a visualization tool rs_driver_viwer in rs_driver/tool , which is based on PCL.
To build it, enable the option CMOPILE_TOOLS when configuring the project.
cmake -DCOMPILE_TOOLS=ON ..
For more info about how to use the rs_driver_viewer, please refer to Visualization tool guide
8 More Topics
For more topics, Please refer to:
Multi-Cast function: Multi-Cast Trasformation function: Transformation guide
For more info about the rs_driver API, Please refer to:
- Parameters definition:
rs_driver/src/rs_driver/driver/driver_param.h - Point Cloud message definition:
rs_driver/src/rs_driver/msg/point_cloud_msg.h - API definition:
rs_driver/src/rs_driver/api/lidar_driver.h - Error code definition:
rs_driver/src/rs_driver/common/error_code.h