

BIN
Document/Laser.png
{kind=link}
BIN
Document/LivoxLaser.png
{kind=link}
BIN
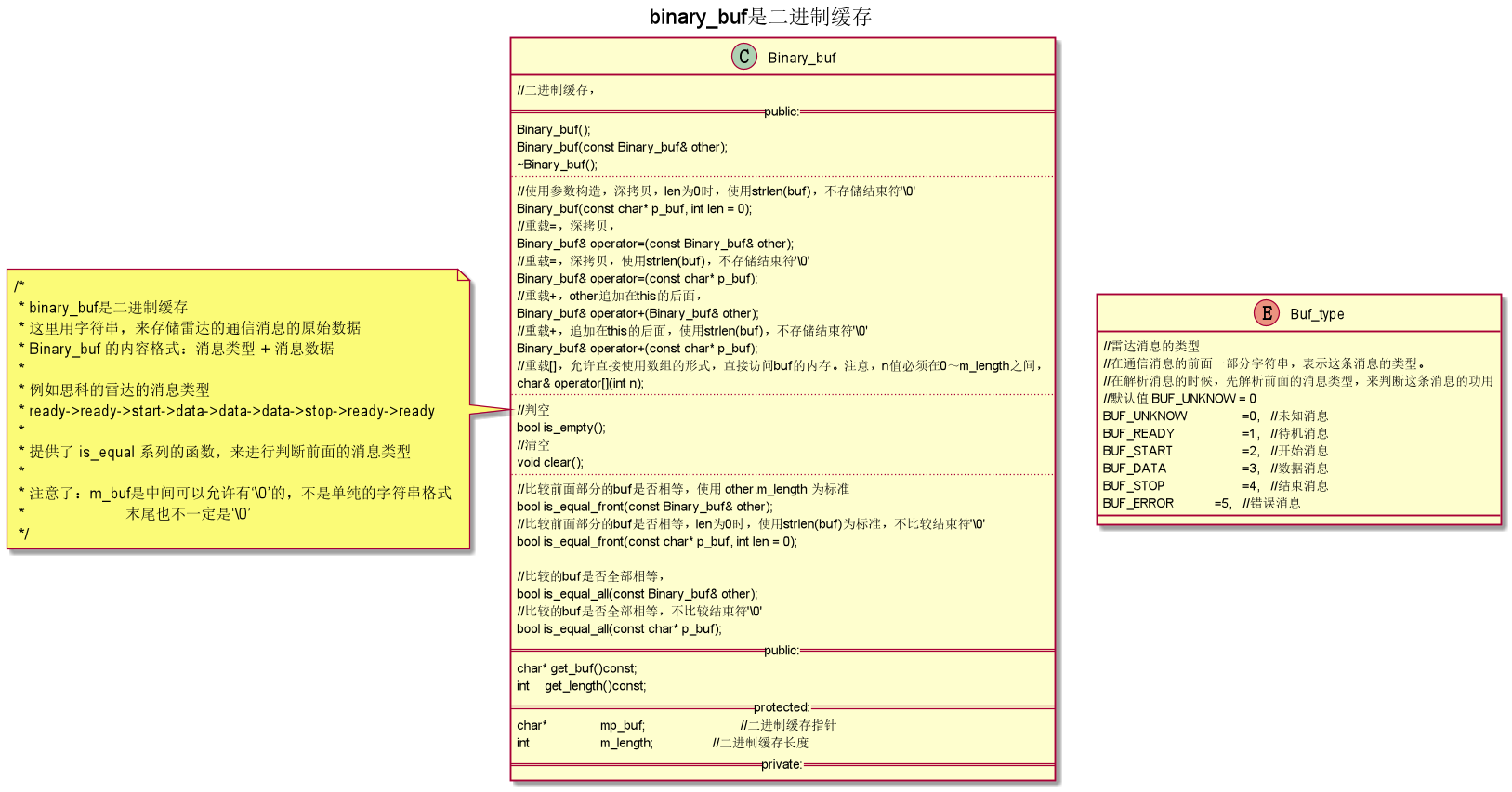
Document/binary_buf.png
{kind=link}
BIN
Document/laser_task_command.png
{kind=link}
BIN
Document/laser功能模块图.eddx
BIN
Document/laser功能模块图.png
{kind=link}
BIN
Document/laser数据流程图.eddx
BIN
Document/laser数据流程图.png
{kind=link}
BIN
Document/laser程序流程图.eddx
BIN
Document/laser程序流程图.png
{kind=link}
BIN
Document/task_command_manager.png
{kind=link}
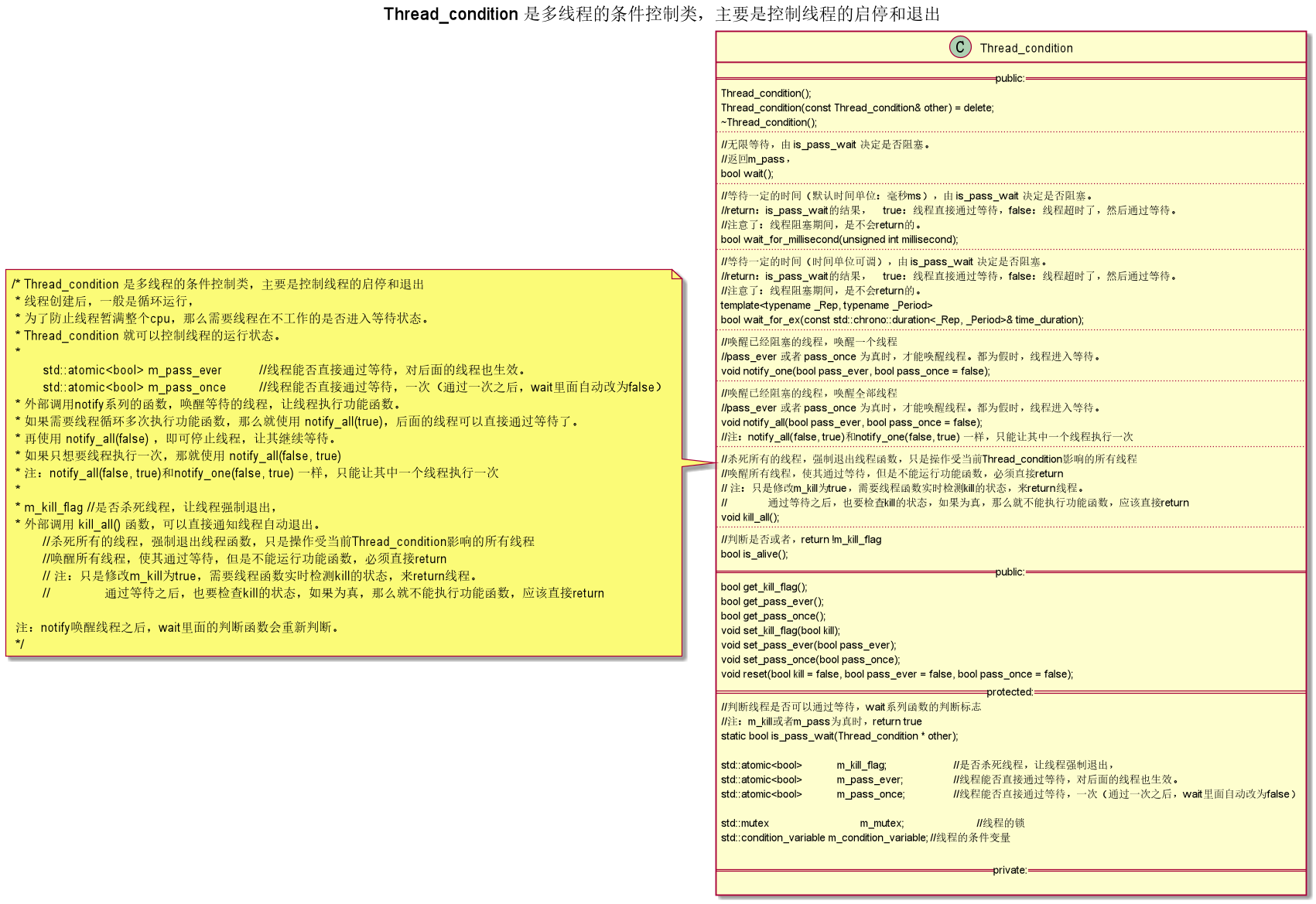
BIN
Document/thread_condition.png
{kind=link}
BIN
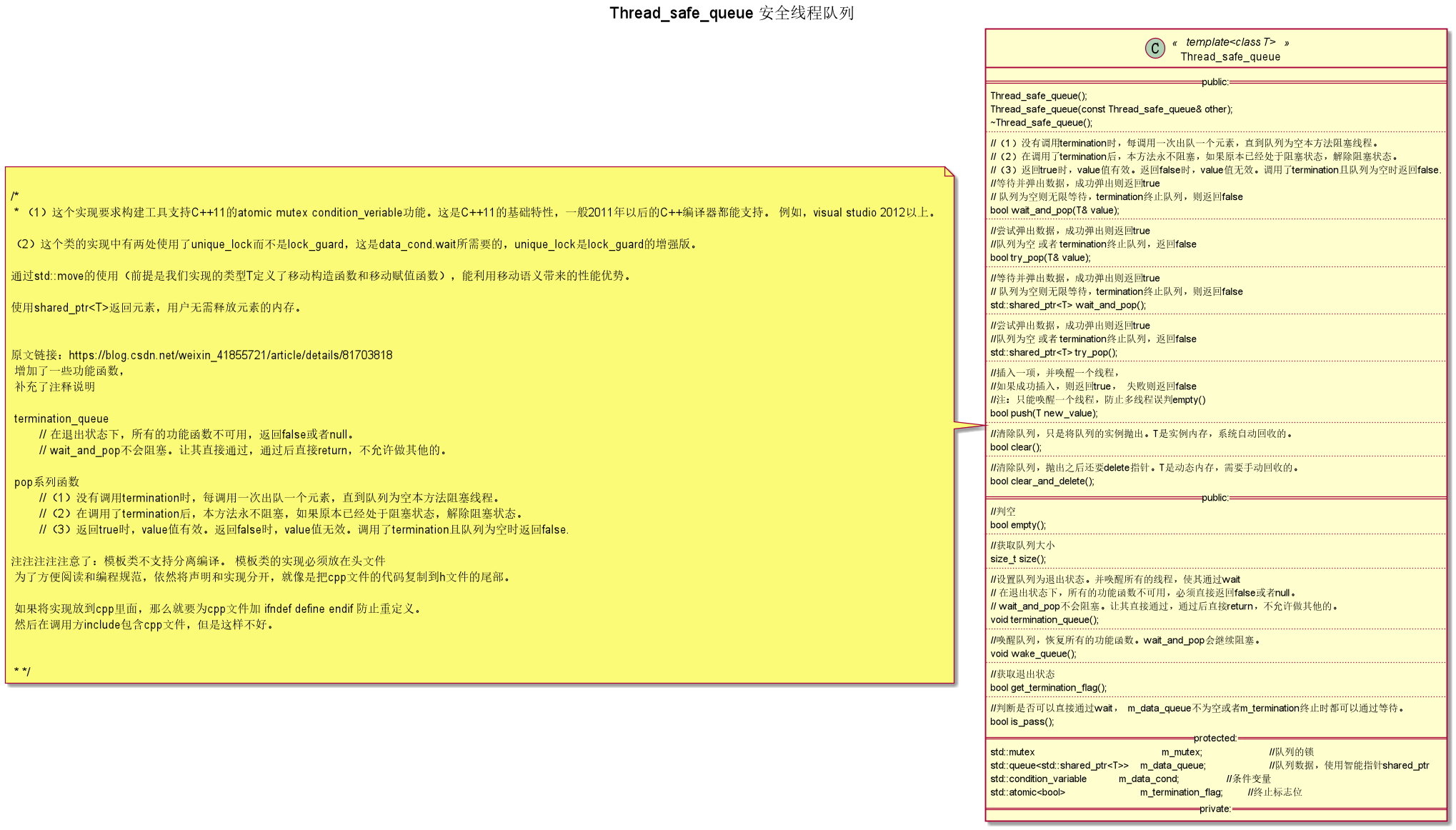
Document/thread_safe_queue.png
{kind=link}
BIN
Document/智象停车测量软件设计文档 .docx
+ 1
- 1
error_code/error_code.h
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 7
- 0
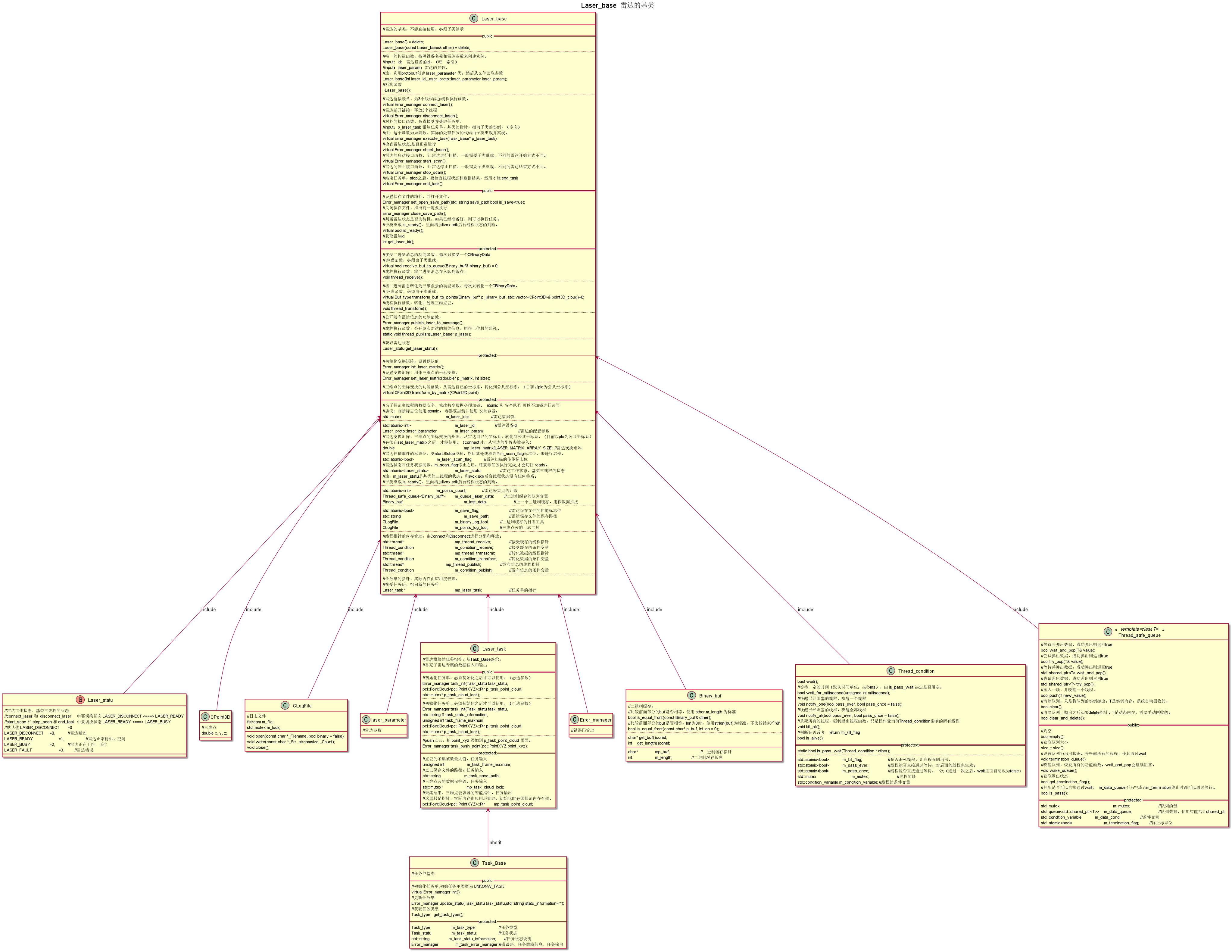
laser/Laser.h
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 4
- 0
laser/Laser.puml
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 4
- 0
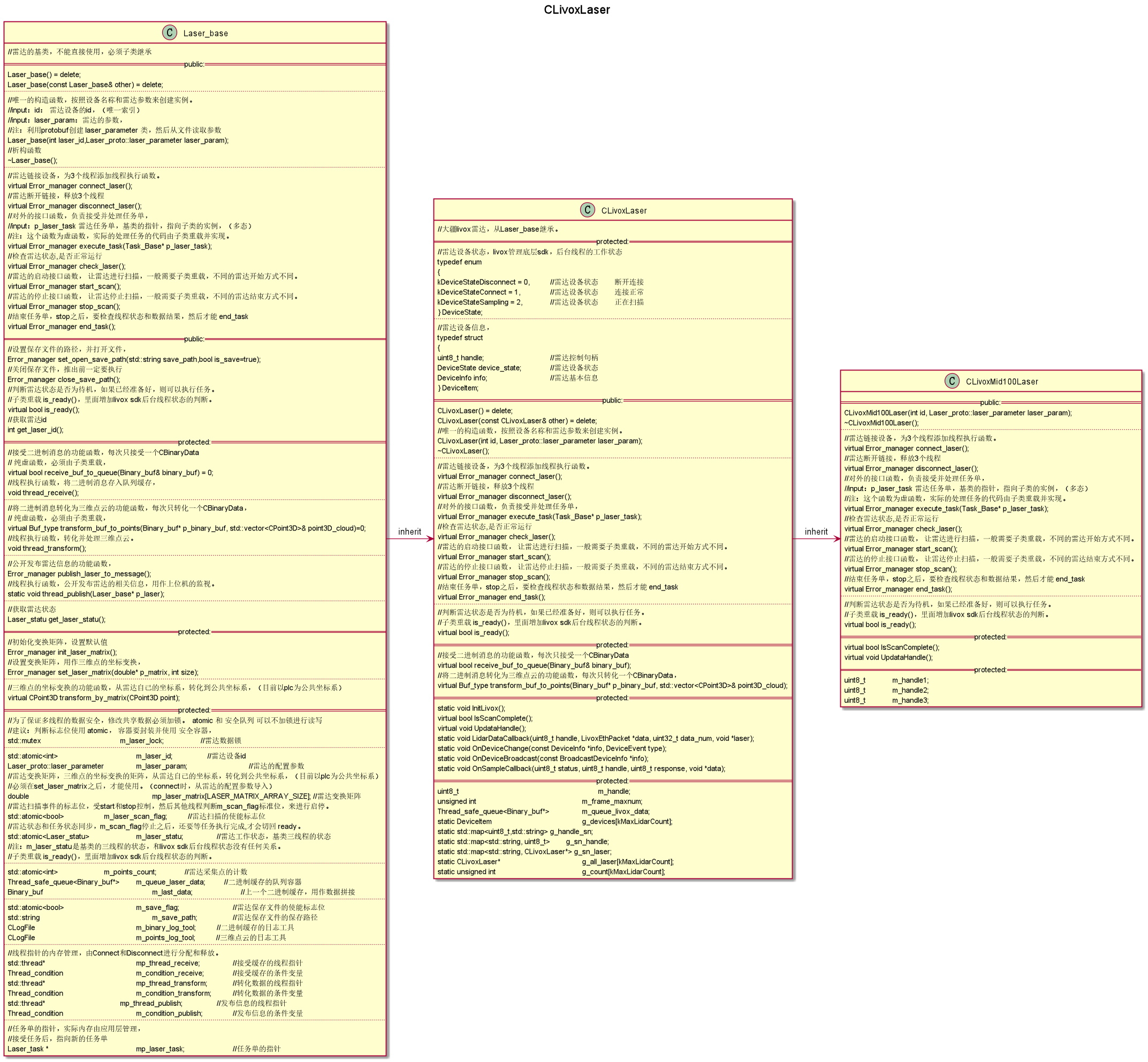
laser/LivoxLaser.puml
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 4
- 0
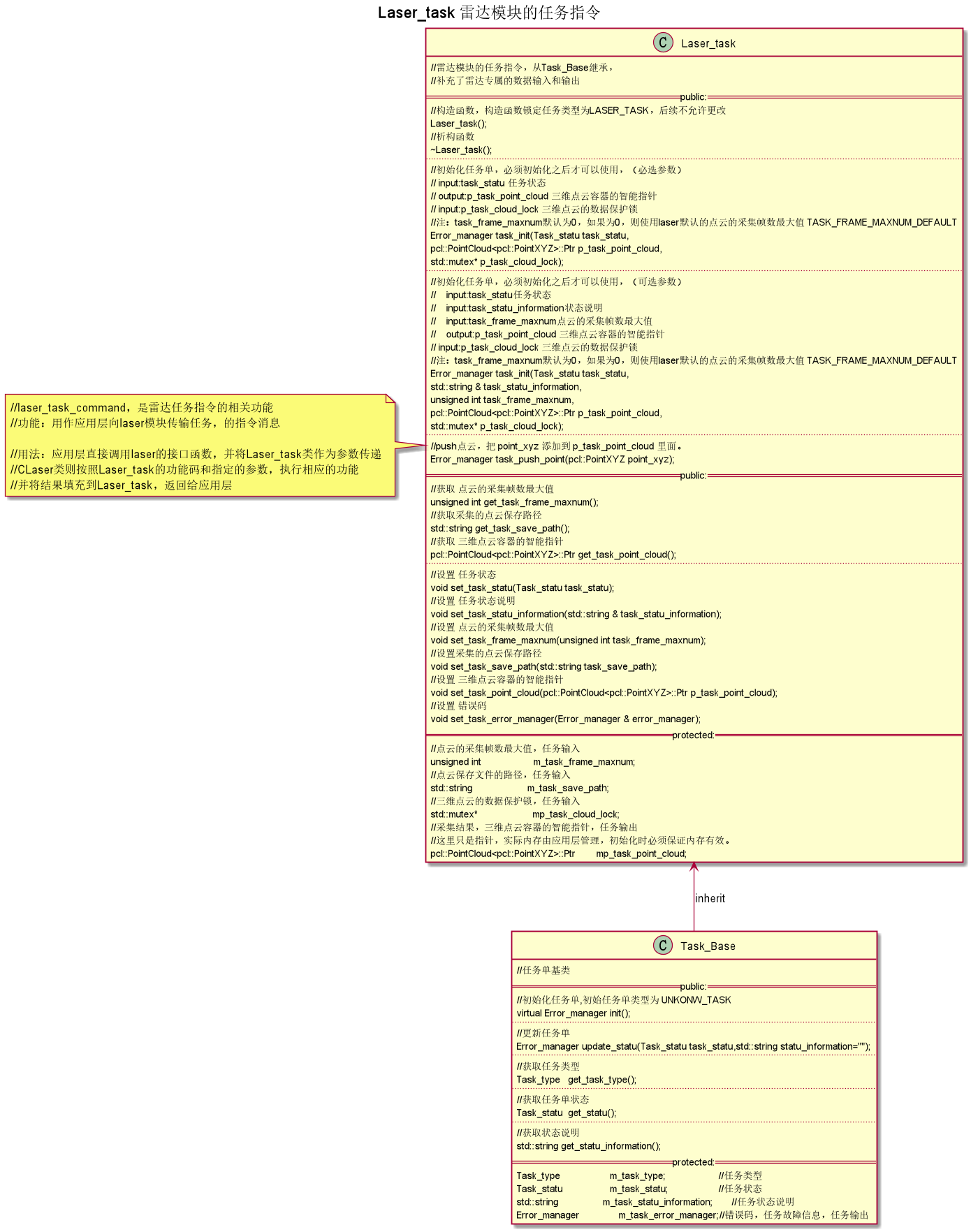
laser/laser_task_command.puml
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 4
- 0
task/task_command_manager.puml
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||